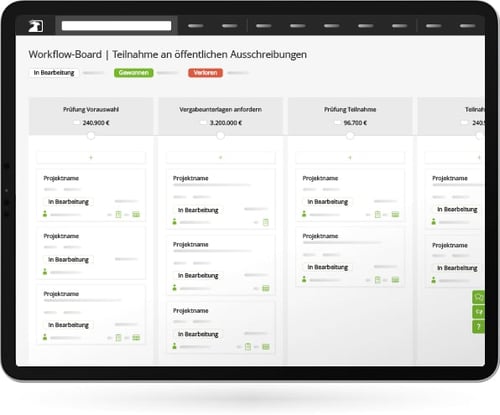
DIE DTAD PLATTFORM
AUSSCHREIBUNGEN EINFACH ERHALTEN UND BEARBEITEN
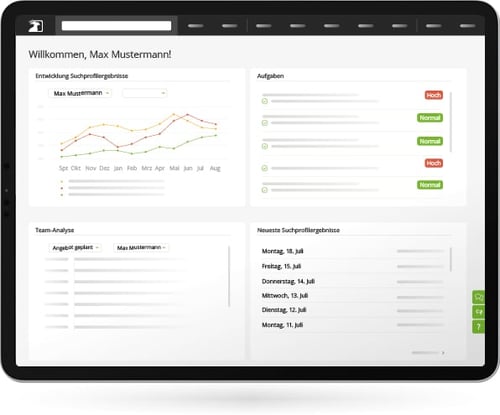
Profitieren Sie von der Plattform des DTAD
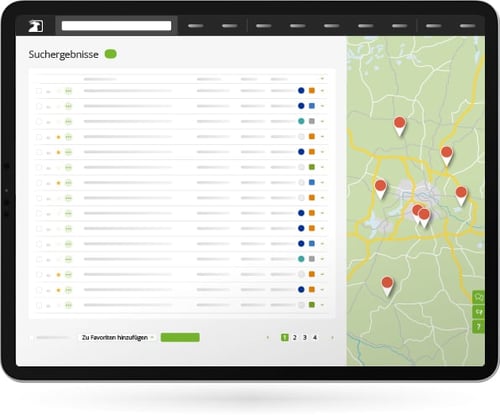
- Passende Ausschreibungen ohne Eigenrecherche erhalten
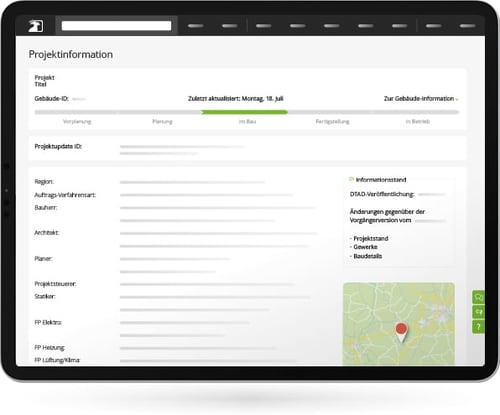
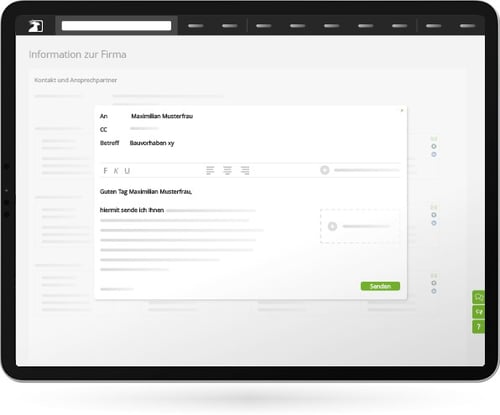
- Zugriff auf Leistungsbeschreibung und Vergabeunterlagen
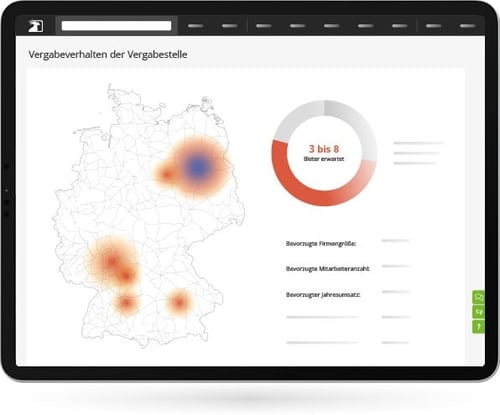
- Mit Analysen zu Vergabestellen und erwarteten Bietern
- Einfacher Zugang zu öffentlichen Projekten und Rahmenverträgen